概要
受動的動歩行とは,アクチュエータ等の駆動機構を持たない歩行機械が,適切な初期条件を与えられると,重力場を利用して緩やかな坂道を歩き下るという現象のことをいいます.1990 年に T. McGeer が実験的に実現可能性を示したのが学術的には最初ですが,その後多くの研究がなされ,「引き込み現象」や「分岐現象」と行った非常に興味深い現象を示すことが知られています.
本研究室では,受動的動歩行が示す興味深い現象に着目し,科学的側面(力学的現象としてのおもしろさ),工学的側面(よりなめらかでよりエネルギー的に効率の良い歩行ロボット実現に向けた応用)の両面から研究を行っています.
最近では,その運動の理論的解析の研究に特に力を入れられ,下記に述べるImplicit Feedback Structureのような興味深い構造を持つことを明らかにしている一方で,数値シミュレーションだけではなく,受動的動歩行ロボット「Quartetシリーズ」を実際に作成し,様々な現象を実機にて確認することもおこなわれています.
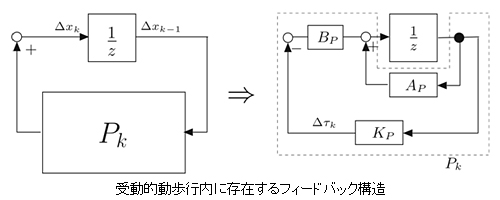
Implicit Feedback Structure
受動的動歩行の力学的原理解明を目指す中,その運動を周期運動と考え,その近似的なポアンカレマップを解析的に導出すると,その写像内にフィードバック構造と見なせる構造が存在することを明らかにしてきました.この興味深い構造の存在は,「受動的動歩行という現象がなぜ安定になるか?」という根本的疑問へ答える際に,一つの大きな鍵になると考えられています.
Quartetシリーズ
Quartet-I
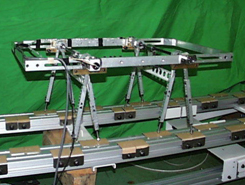
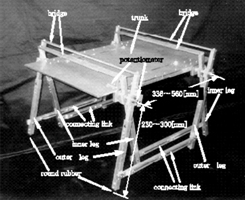 Quartetシリーズの初代.御神輿をヒントに考えられたもので,4名(全8脚)で一つのものを協力して運んでいるイメージよりQuartetと名付けられたロボットです.ただし,外側の4脚,内側の4脚がそれぞれ閉リンクで連結されているので,実質上は2脚と見なすことができます.
Quartetシリーズの初代.御神輿をヒントに考えられたもので,4名(全8脚)で一つのものを協力して運んでいるイメージよりQuartetと名付けられたロボットです.ただし,外側の4脚,内側の4脚がそれぞれ閉リンクで連結されているので,実質上は2脚と見なすことができます.
Quartet-II
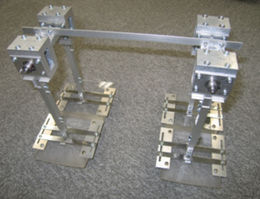
 シリーズ二代目.Iでは外側の4脚,内側の4脚がそれぞれ閉リンクで連結されていましたが,IIでは動特性の対称性を持たせるために,前脚の内側と後脚の外側,前脚の外側と後脚の内側がリンクする構造となっています.また,分岐現象が起きることは数値シミュレーションではよく知られていましたが,この実験機により坂の傾斜角を変化させることで,一周期歩行だけでなく二周期歩行が実機においても起こることを確認しています.
シリーズ二代目.Iでは外側の4脚,内側の4脚がそれぞれ閉リンクで連結されていましたが,IIでは動特性の対称性を持たせるために,前脚の内側と後脚の外側,前脚の外側と後脚の内側がリンクする構造となっています.また,分岐現象が起きることは数値シミュレーションではよく知られていましたが,この実験機により坂の傾斜角を変化させることで,一周期歩行だけでなく二周期歩行が実機においても起こることを確認しています.
Quartet-III
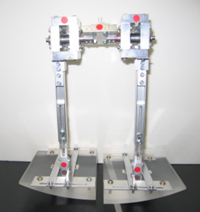
 シリーズ三代目.機構的にはIIとほぼ同一であるが,I, IIとは異なり脚駆動用のモータが取り付けられています.ただし,DirectDriveモータ(DDモータ)を採用し,制御を行わないときにはフリーで脚が動くようになっているため,歩き始めや外乱がはいった時のみ制御を行い,それ以外は受動的歩行を行う準受動的動歩行が実現できるロボットです.また,I,IIでは遊脚が床をこすらないよう足場を置く必要がありましたが,Quartet-IIIは脚の中に伸縮機構を搭載しているため,その必要がなくなり実験が容易になっています.
シリーズ三代目.機構的にはIIとほぼ同一であるが,I, IIとは異なり脚駆動用のモータが取り付けられています.ただし,DirectDriveモータ(DDモータ)を採用し,制御を行わないときにはフリーで脚が動くようになっているため,歩き始めや外乱がはいった時のみ制御を行い,それ以外は受動的歩行を行う準受動的動歩行が実現できるロボットです.また,I,IIでは遊脚が床をこすらないよう足場を置く必要がありましたが,Quartet-IIIは脚の中に伸縮機構を搭載しているため,その必要がなくなり実験が容易になっています.
多脚型受動的動歩行ロボット Jenkkaシリーズ
Jenkka-I
多脚型受動的動歩行ロボット Jenkkaシリーズの初代.基本構成要素は二脚のロボットだが,胴体でつなぎ合わせることで四脚や六脚での歩行を実現できます.機構上,ペース歩行が出やすいものの,胴体の自由度(ロール,ピッチ)を変えることにより,ウオーク歩行やトロット歩行といった歩容がでることも確認しています.