概要
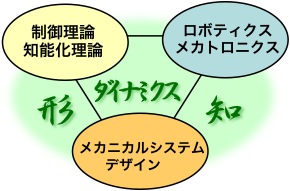
「ダイナミクス」と「制御」の本質を深く知り,力学系に潜む「知のメカニズム」 のしくみを解き明かす.そしてそれを核に,巧みな動きを実現する動的システムの新たな設計原理を構築する.これが本研究室の柱です.
常に「ダイナミクス」を意識して研究し,背後にある「知」をとらえることを目指す
研究領域
本研究室では,「できるだけ尖れ」を旗印に研究を進めます.すなわち,近視眼的な実用化を狙うのではなく,できるだけ突拍子もないことをあえて狙うことを心がけています.それこそが大学の研究だと思うからです.もちろん実用化研究を否定するものではありません.たとえば,実用化において10の力が定常的に必要とされるならば,瞬発力として100の力を出せなくてはなりません.そのためには大学では「尖る」必要があるのです.また,とことん尖った研究は巡り巡って実は最終的には実用的技術の基礎になると思っていますし,そうあるべきだとも考えています.「基礎研究」対「実用化研究」という二元論的捉え方ではなく,「基礎研究」即「実用化研究」,あるいは,基礎研究の外に実用化研究があるのではなく基礎研究の中に究極的存在として実用化研究はある,という考え方です.
- 非線形力学
- 非線形システム制御理論
- リアルタイム環境適応機能
- リバースエンジニアリング
- インテリジェントセンサシステム
- 形態動力学的アプローチ
テーマ
本研究室のテーマは「制御学」です.私達はこのテーマに取り組む際,主観を捨て去り先入観をとっぱらって純粋にこの世界の様々な事柄を見ることから始めます.そうすると,これまでの常識が覆され「目からウロコ」を体感する瞬間が訪れ,その刹那「制御」の本質が見えてきます.このような体験を具現化する際に必要不可欠な要素は「理論」と「実験」です.両者が重なって共振したとき自己の内に「制御哲学」が生まれ,新たな研究分野が展開されます. そして,以上のようなことを推進する際に最も重要なのは「動機」であり,私達の研究室では,それは『「面白くてカッコイイ」を目指す』です.
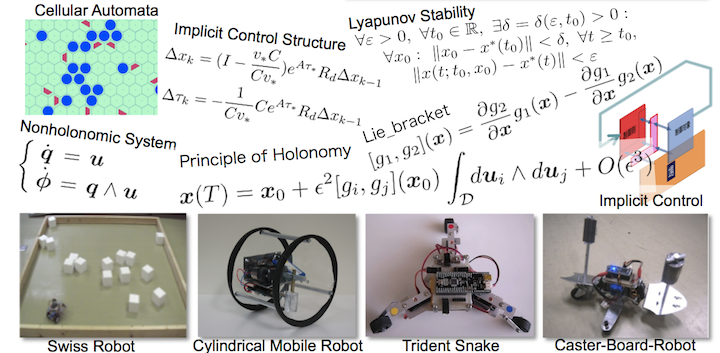
- 陰的制御論の構築
- 劣駆動システムの理解と制御
- ダイナミクスを活かした制御
- 超群システムの基礎と構築
- 高機能センサシステムの開発
- レスキューロボットシステム