探索:MOIRAシリーズ
特に倒壊家屋内に取り残された要救助者の位置を同定するためのロボットシステムを開発しています.この種のロボットシステムに要求される機能には,(a)上下から障害物が迫っている瓦礫内を自力で突き進む,(b)電波が届かない可能性がある環境におけるロボットシステムの位置同定機能,があります.このうち,(a)については独自の推進機構「二重クローラ方式」を提案し,その有効性を実機を開発することで確認しています.具体的には,下図のように上下に同方向に移動するクローラを装着することで,瓦礫の中に頭を突っ込んだロボットが楔のようにどんどん自力で瓦礫内に突き進むことができます.
-

- MOIRA1(2004)
-

- MOIRA2(2005)
-
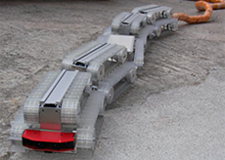
- MOIRA3(2006)
(b)については,そもそもMOIRAが有線方式であることを利用して,そのケーブルの外側に外骨格方式の多関節チューブを被せることでケーブル自体を形状センサー化することを提案しています.これをFST(Flexible Sensor Tube)と呼びます.
-

- FST-01(2004)
-

- FST-02(2005)
-

- FST-03(2006)
掘削: Robotic Followerシリーズ
瓦礫内のどこに要救助者が取り残されているかが同定できたら,その次に行うべき活動は要救助者の掘り出しです.そのための研究は世界的にみてもほとんどなく,私たちは,(a)セルフロック機構付掘削用マニピュレータ,(b)パワーアシスト型掘削用マニピュレータ,を提案しています.このうち(a)については,下図のような双腕型マニピュレータを提案してきました.このマニピュレータの特徴は,全ての関節にウォームギアが使用されているところです.そのメリットは,ウォームギアはバックドライバビリティーが無い点です.すなわち,瓦礫除去作業を行っているときに停電になった場合,機構的にロックがかかり,瓦礫を落とすことなくその姿勢を保持できるということです.
-
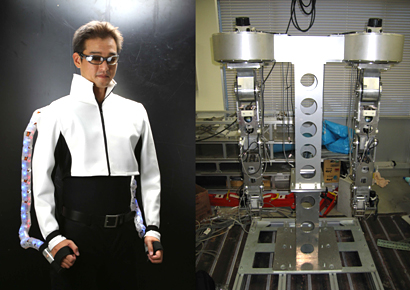
- (a)双腕型マスタースレーブシステム
-
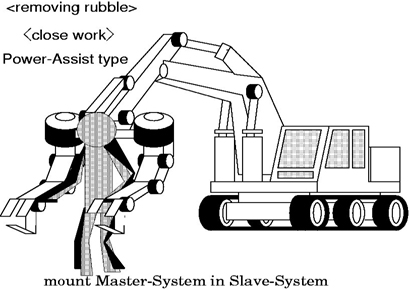
- (b)パワーアシスト方式構想
搬送: DUCKSシリーズ
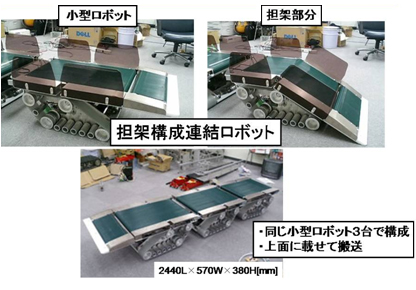
レスキュー活動における最後の作業項目が搬送です.地面に横たわっている要救助者を,ロボットが自分で自分の体の中に収容して安全な場所に運ぶことができるレスキューロボットは世界に1台しかなく,それは東京消防庁のRobo-Qです.ただこのロボットは非常に大きく,重たく,救出活動が危険なように見えました.そこで私たちは,小型の移動ロボットを複数合体させることで小型軽量化を図りました.また要救助者をロボットの上に収容する部分ではMORAの二重クローラ方式を利用しています.
-

- (a)担架構成用ロボット(2005)
-
- (b)DUCKS(2007)